Stäubli Industrial Robots
📑
Stäubli Industrial Robots
To control Stäubli robots, ensure your robot controller meets the following requirements:
- Controller Version: CS8C
- 🔗 UniVAL Drive License Activated (EtherCAT CoE)
- EtherCAT Slave Fieldbus Card Installed (Hilscher CIFX-50)
- Controller Version: CS9
- 🔗 UniVAL Drive License Activated (EtherCAT CoE)
- EtherCAT Slave Operation Enabled on Ethernet RT Port
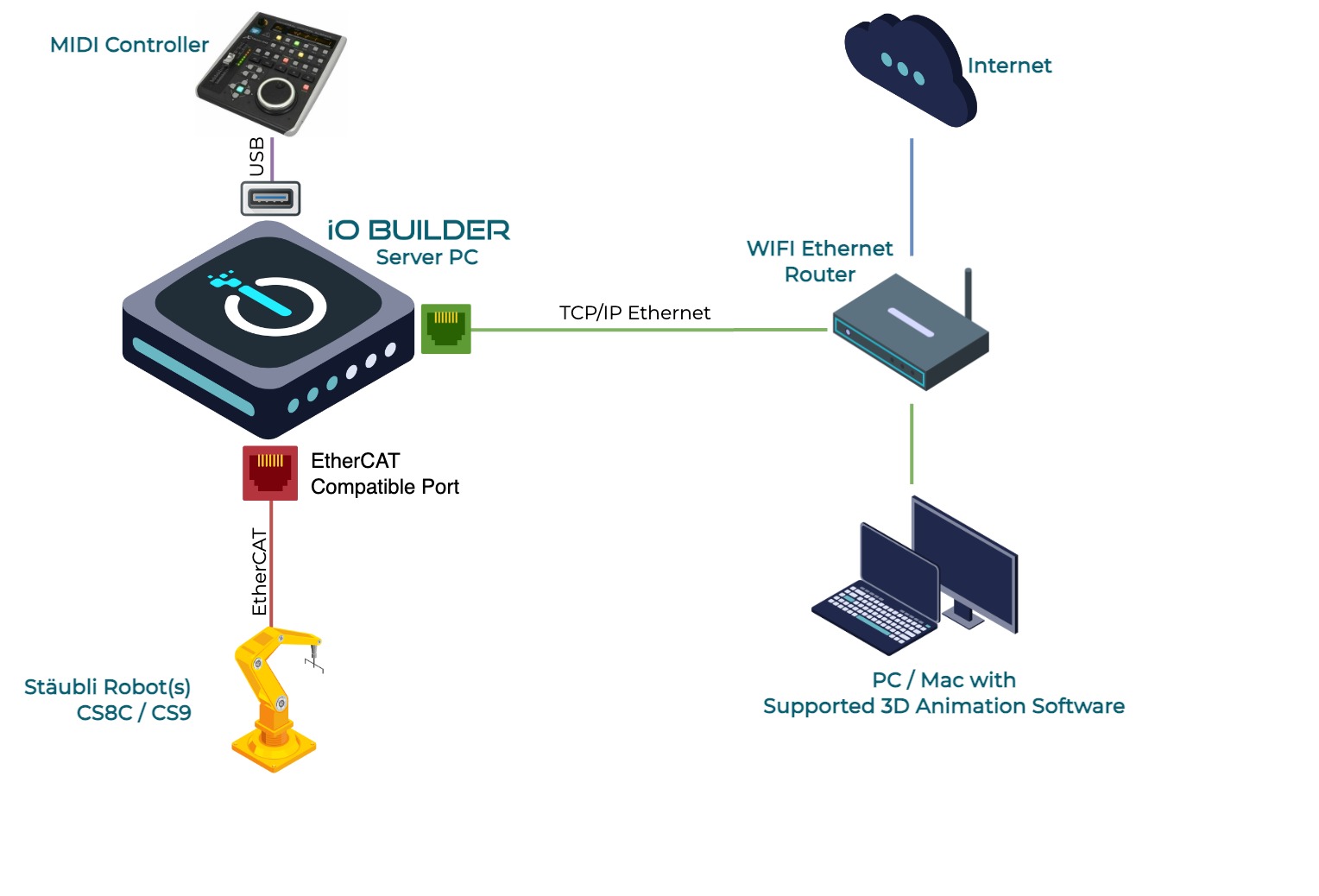
Connect the EtherCAT IN port on the robot controller to one of the following:
- The IO Builder PC's Real-Time Ethernet (EtherCAT Master) Port.
- The OUT Port of the previous EtherCAT Slave Device or EtherCAT Junction.
For detailed guidance on operation or further assistance, consult the Stäubli UniVAL Drive Manual or Contact Our Support Team.
CS8C EtherCAT Slave Ports
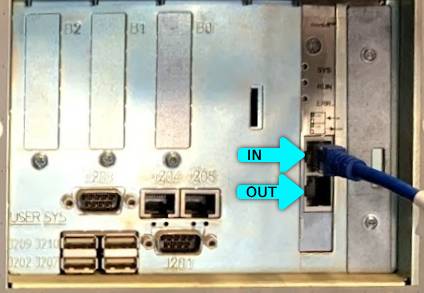
CS9 EtherCAT Slave Ports

EtherCAT IN: J207 | EtherCAT OUT: J208
Controller Configuration
To configure your controller, you might need a Windows PC
- Stäubli Robotics Suite (Free version) installed.
- An FTP client (such as WinSCP).
Use ports J204 or J205 on the controller for configuration purposes. You can check/assign IP addresses to these interfaces using the teach pendant.